2024 – 2025
J’ai commencé un mentoring en modélisation 3D hardsurface avec Andrew Hodgson, Senior Hardsurface modeler.
Le but de ce projet est de pousser la modélisation à son potentiel maximum, selon la pipeline et les méthodes de l’industrie. C’est le but.
Cela fait depuis 2019 que je suis et regarde les vidéos et les lives d’Andrew, j’ai beaucoup appris avec ces ressources, et j’ai toujours voulu travailler avec lui. Ce mentoring est un moyen d’apprendre les méthodes de l’industrie en profondeur, et de créer une pièce de portfolio solide.
Je vais documenter les procédés et partager des screenshots de mon travail ici, pour chacun qui pourrait trouver cela utile.
Avant de commencer, voila le site internet d’Andrew Hodgson, vous pouvez allez voir son travail ici : https://andrew-hodgson.com/
Choix du concept
Après la review de mon portfolio avec Andrew, nous avons parlé de ce qui serait le mieux de travailler pour moi. Nous sommes tombés d’accord sur le fait que j’avais déjà fait beaucoup de véhicules, et qu’un robot ou un « mecha » pourrait être un bon plus pour mon portfolio.
Après quelques recherches, nous nous sommes accordés sur ce concept de Brian Sum.
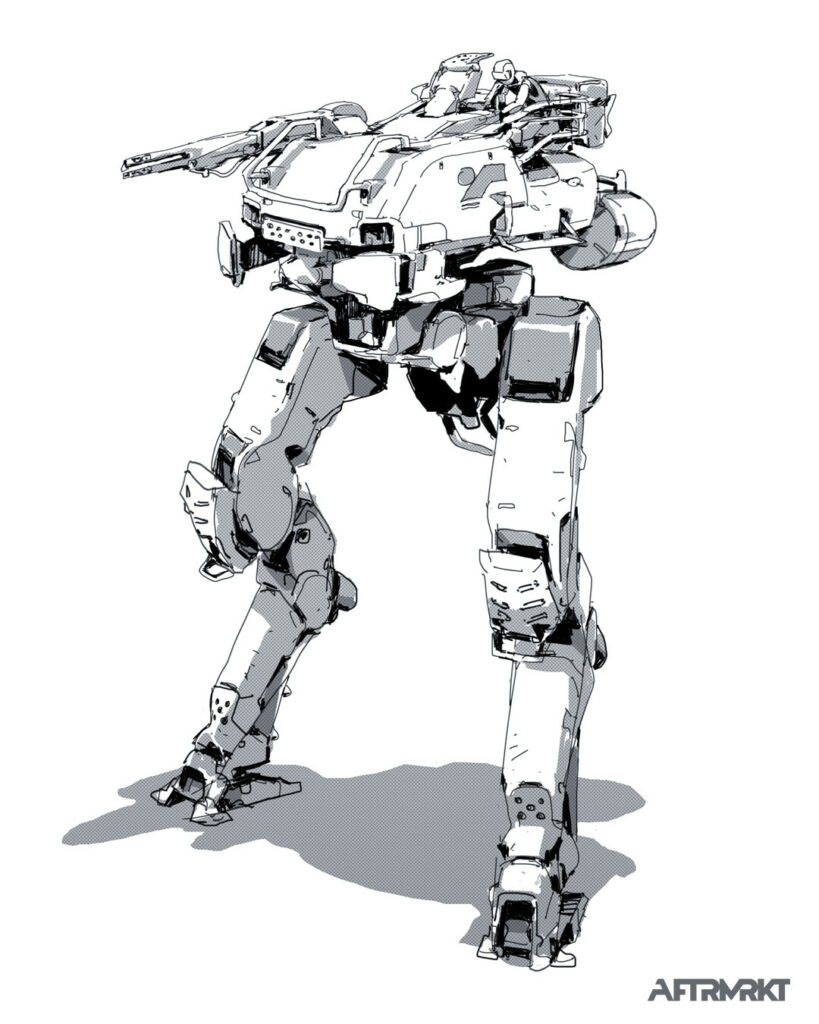
Comme le but était de compléter mes compétences, ce concept implique beaucoup de problèmes créatifs à résoudre.
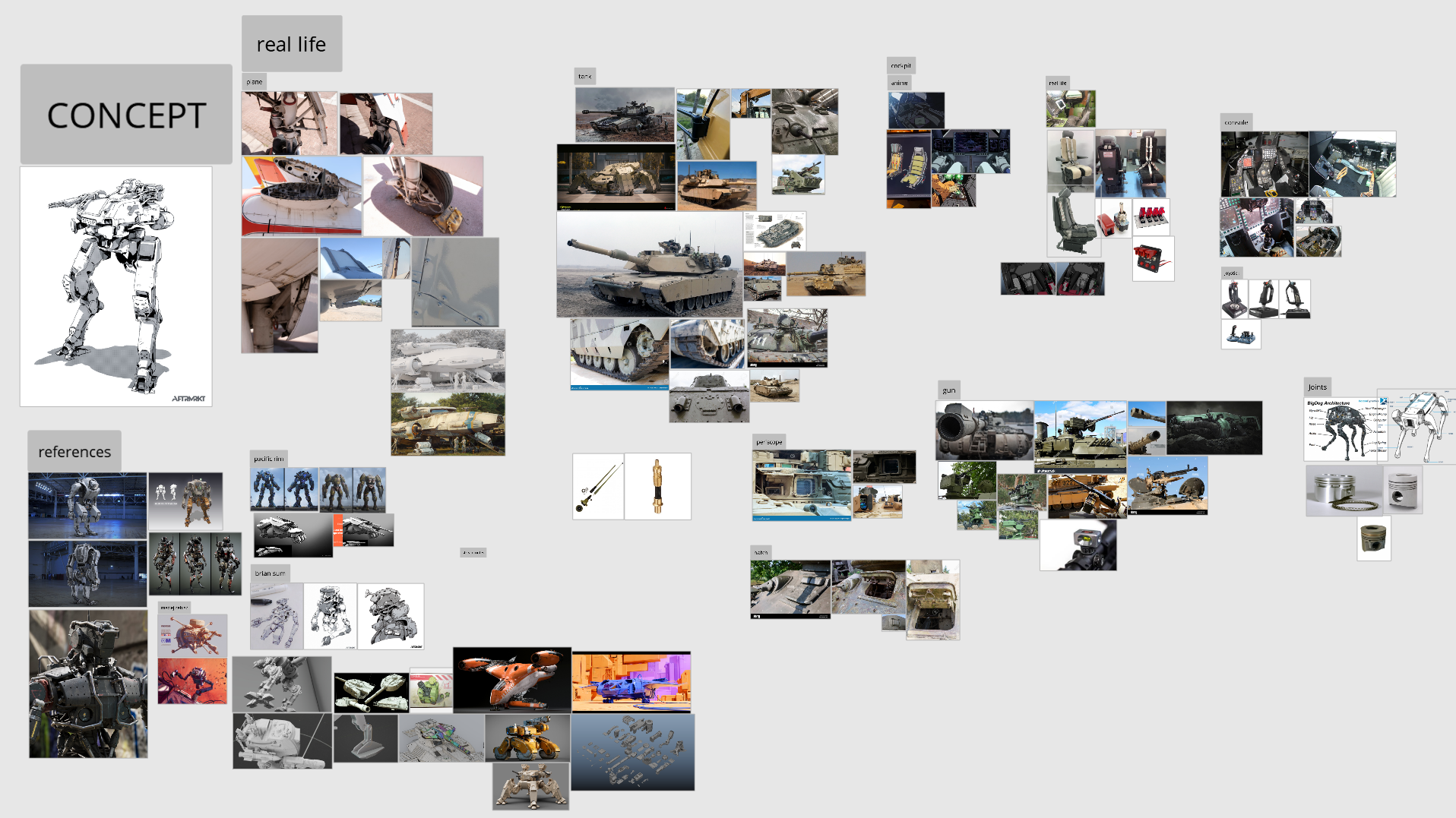
Trouver des références
Pour le bien de la documentation de ce projet, je vais partager mon PureRef ici. Rechercher et prendre des références tout le long du projet est très important. Par exemple, les vraies photos de tank ainsi que leur documentation sont arrivées plus tard, et m’ont aidé à affiner les détails du robot afin de le rendre plus réaliste (pour les grosses parties du corps, les panels, ou bien les petits détails à ajouter sur la surface du robot).
Partie 01 – Blocking
Première étape, le blocking. Comme je fait d’habitude, j’ai commencé à faire les formes en partant de planes.
Après notre première session, Andrew m’a montré une nouvelle méthode (du moins pour moi) qui consiste à faire le blocking avec des formes fermées, très vagues, et avec une géométrie simple (en gardant le tout très lowpoly).
Cette méthode peut aider à avoir une idée rapide des proportions, et aide la transition entre les différentes équipes pendant une production (Rigging, Animation…), surtout avec les mécanismes, comme je vais en parler plus tard dans cet article.

Penser le mécanisme en avance
Comme vous pouvez le voir dans le screenshot précédent, nous avons planifié la rotation des articulations pendant le blocking. Les grosses parties du robot ont été créées selon les futures rotations des articulations, afin qu’il n’y ai pas d’intersection et de collisions de mesh pendant que la jambe bouge par exemple.
Andrew m’a donné une super astuce pour le blocking des différentes articulations. Il s’agit de faire des groupes de couleurs selon ce qui va s’articuler, ce que je n’avais jamais pensé à faire. Comme le concept est plutôt vague, cela m’a aidé à mieux définir les formes et les volumes, et surtout qu’ils marchent avec les rotations.
C’est ainsi que la partie rouge du corps à été définie, tout en gardant la modélisation cohérente, selon les conseils d’Andrew. (La transition de volume circulaire à rectanglure, du rouge au vert sur le screen shot).

Affinage du modèle et prévisions des materials.
Une fois que nous avons eu (à peu près) les articulations du robot planifiées, nous avons commencé à penser aux materials. C’est ici que la documentation sur les tanks est devenue bien pratique.
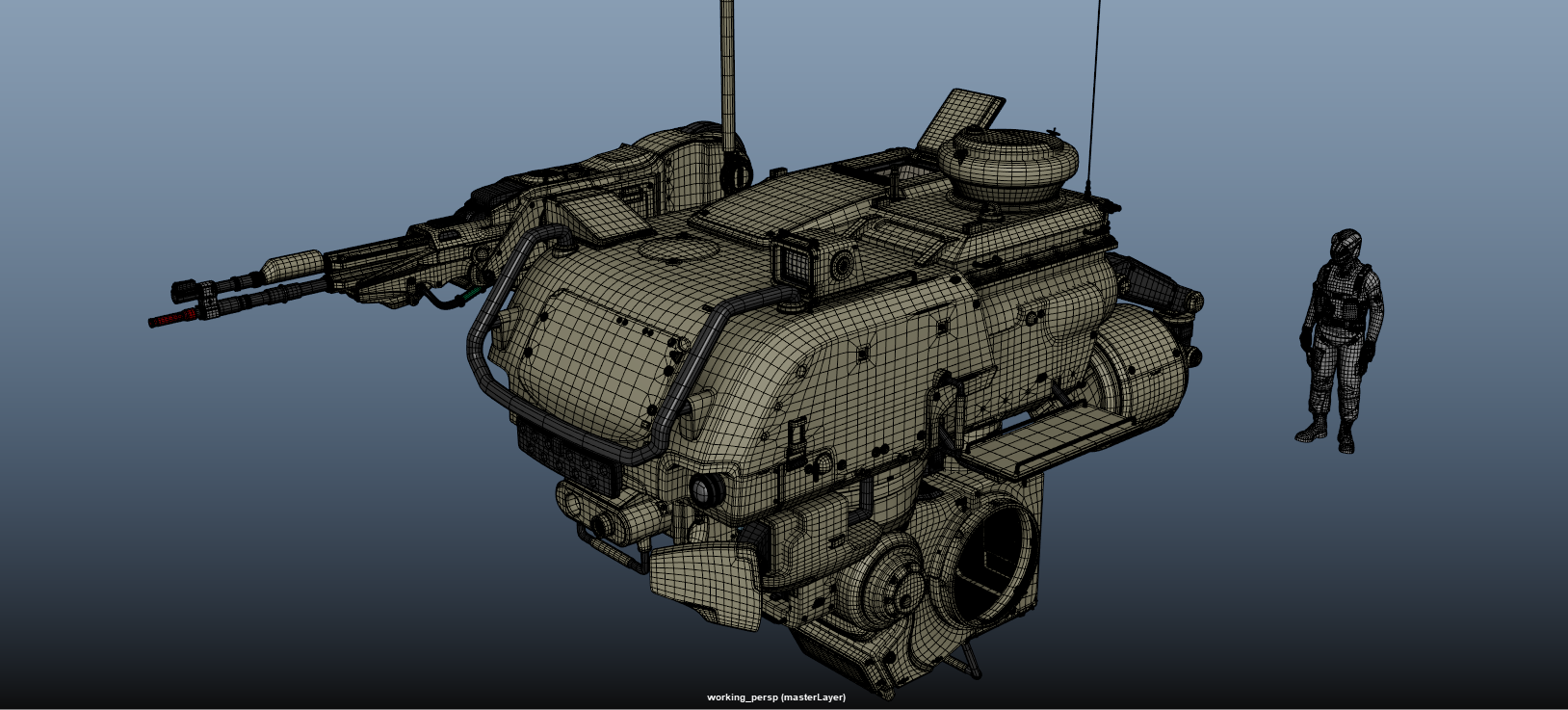
Côté modélisation, nous nous sommes accordés sur les bonnes proportions, et j’ai commencé à affiner le modèle, et faire quelques panels.
Un être humain a aussi été ajouté, pour mieux comprendre la taille et le volume que prenait le robot (et avec cela, la taille des détails que nous apposerons plus tard).


Partie 02 – Approbation du blocking, début des détails.
Tête et arme
Une fois le blocking de la tête, de l’arme, et des jambes approuvé par Andrew, il était temps pour moi de commencer à chercher des petits détails présent sur le concept, et comment ceux-ci ce transférerai en 3D , avec l’aide de photos de vrais tanks.
Tout d’abord, je me suis attardée sur l’arme et la tête.
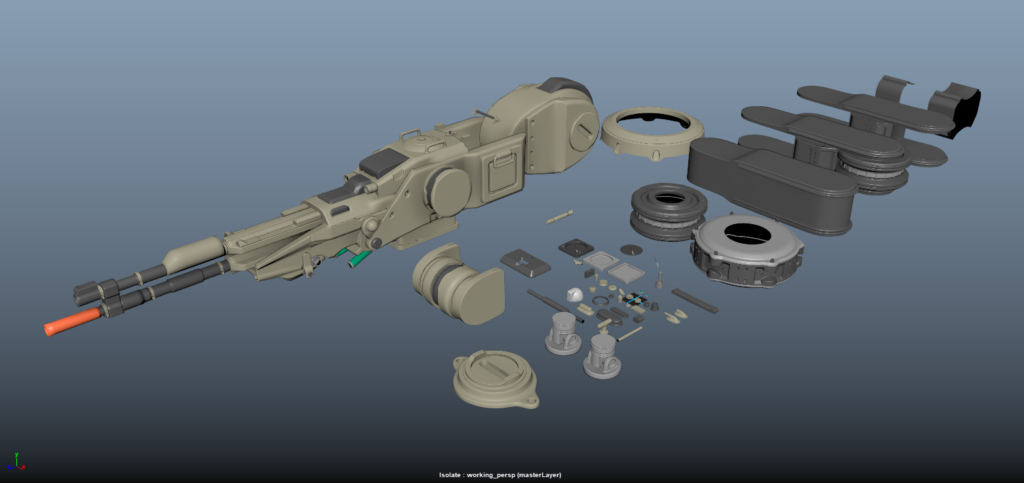
Tout au long de mon projet, j’ai pu construire un petit Kitbash kit, vis, éléments mécaniques de toutes sortes, détails, poignées, quelques uns de ces éléments ont étés créés directement sur le robot puis dupliqués. Avant de dupliquer ces petits détails, j’ai bien fait attention d’avoir bien fait leur UVs, et les avoir rangés correctement.



Corps et jambes
Une fois la tête et l’arme finis, il était temps pour moi de faire la jambe (sans inclure la rotation entre le corps et les jambes, cela viendra plus tard). A ce stade, toute la tête et le corps étaient finis, tripled edge. Je n’appréciais pas beaucoup le design que j’avais créée pour le corps du robot, alors j’ai du recommencer cette partie la. C’est important de garder le creasing des edges et la basse résolution jusqu’a l’approbation finale du modèle.
Pour cette documentation, vous remarquerez qu’un seul côté du robot est fait, cela est dû au fait que je souhaite finir correctement la jambe, avec l’approbation de Andrew et les UVs, avant de la dupliquer (mirror) du côté droit. Cela arrivera à la fin du projet, quand je ferai le layout des UVs.
Partie 03 – Mécanique et rotations
Jambe, corps, pied
C’est important de noter qu’à ce stade, tout le robot, sauf les éléments mécaniques et les rotations, est plutôt fini. Nous pouvons résumer cela en disant que les parties « Beige » sont terminés. Les panels. Nous les avons testés avec nos blocking de rotation, aucune collision, tout fonctionne. Il était maintenant temps de détailler ces mécanismes.
Comme toujours avec les nouvelles méthodes sur ce projet, Andrew m’a montré la bonne direction et j’ai travaillé depuis ce point de départ.
Pied
Le pied était déjà plutôt avancé, mais nous devions être sûrs que les rotations avaient du sens, et qu’elles fonctionnaient réalistiquement. C’est ici que j’ai utilisé des keyframes, pour simuler les amplitudes maximum et minimum du pied, et construire le mesh autour de ces informations.
Après cela, cela était surtout du kitbashing, rester cohérent avec l’esthétique des autres éléments mécaniques, et construire autour de cette idée.
Nous avons utilisé un « Ball joint » classique afin de rendre l’articulation du pied plus simple. Comme c’est un robot, les articulations sont plutôt simples.
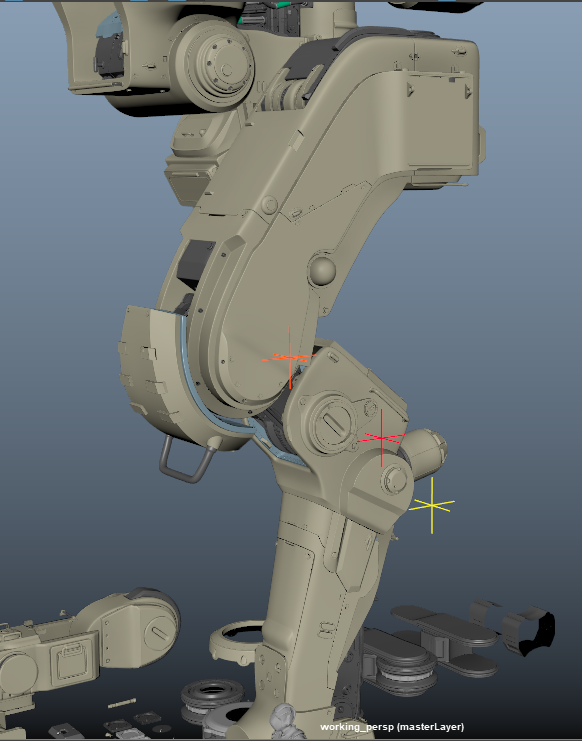
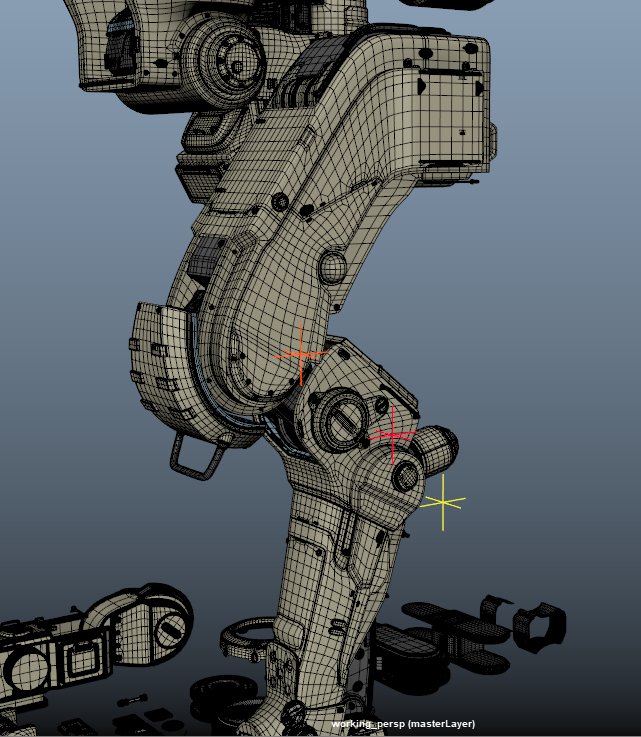
Genoux, mollet
Pour le genoux, comme il s’agissait d’une articulation circulaire, des locators ont été ajoutés à chaque point de pivot important, afin de dupliquer les éléments autour de ces cylindres plus facilement.
Vous pouvez les voir ici.
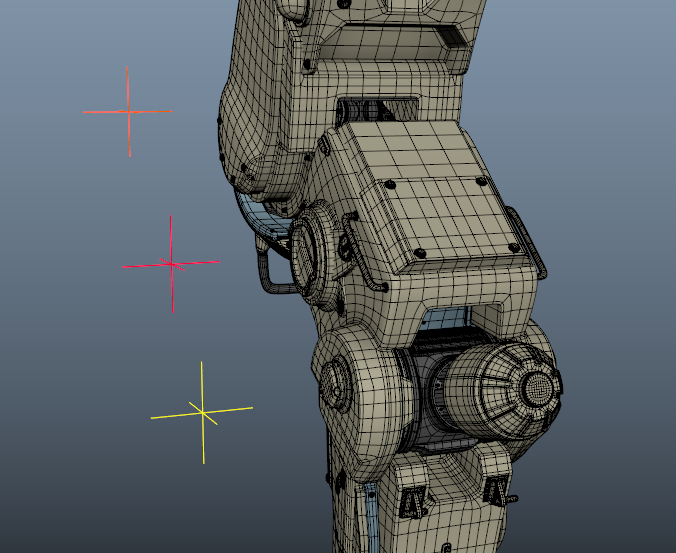
Les rotations du genoux sont coupées en deux parties, une principale, et une plus petite, la petite partie était le genoux, et les principales étant le mollet. Le même procédé que pour le pied à été utilisé. Grâce à ce procédé, j’ai fait de la place dans la modélisation avec des trous, afin que les pièces puissent bouger et faire de la place pour les articulations.
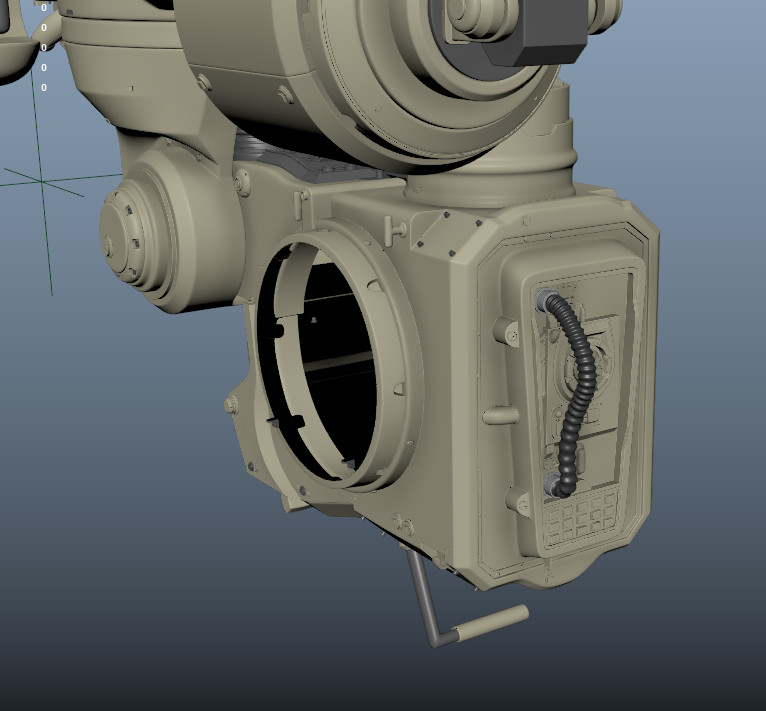
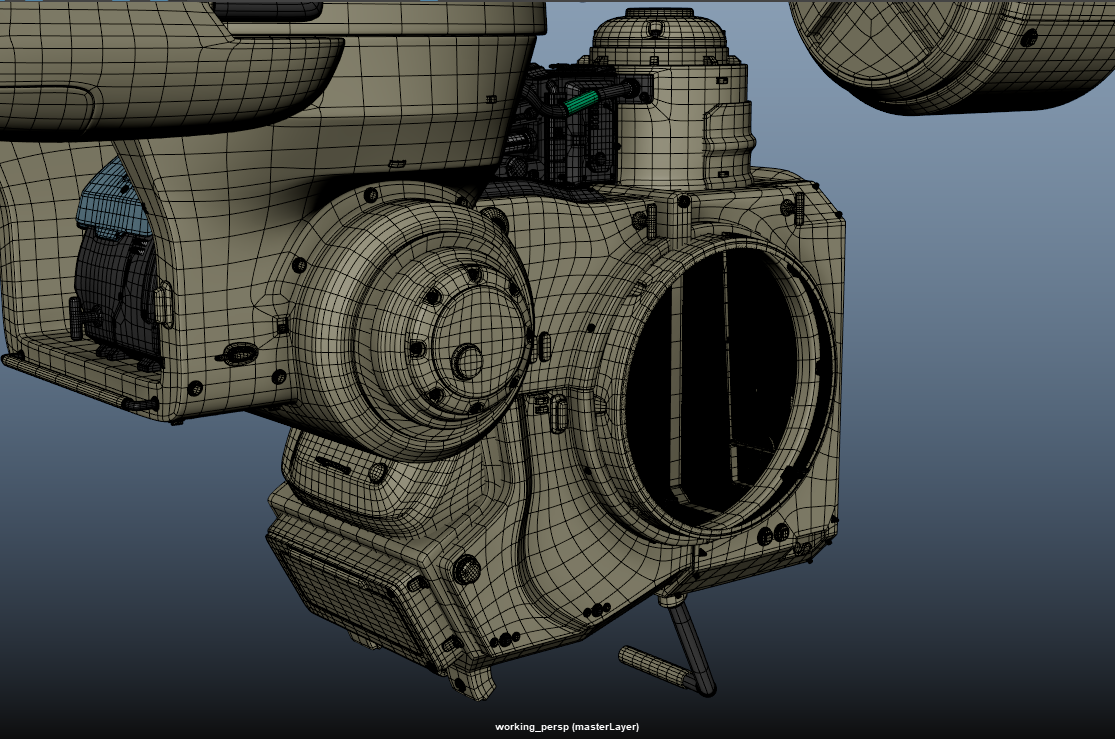
Corps
Cette partie de l’article sera petite, car il n’y a pas d’éléments mécaniques articulés véritable. Je lui ai donné une esthétique mécanique, mais il ne s’articule pas.
Comme souvent, j’ai utilisé mes éléments de kitbash, mais en faisant ça, il faut faire attention à rester cohérent dans les détails qu’on utilise.

Articulation de la jambe
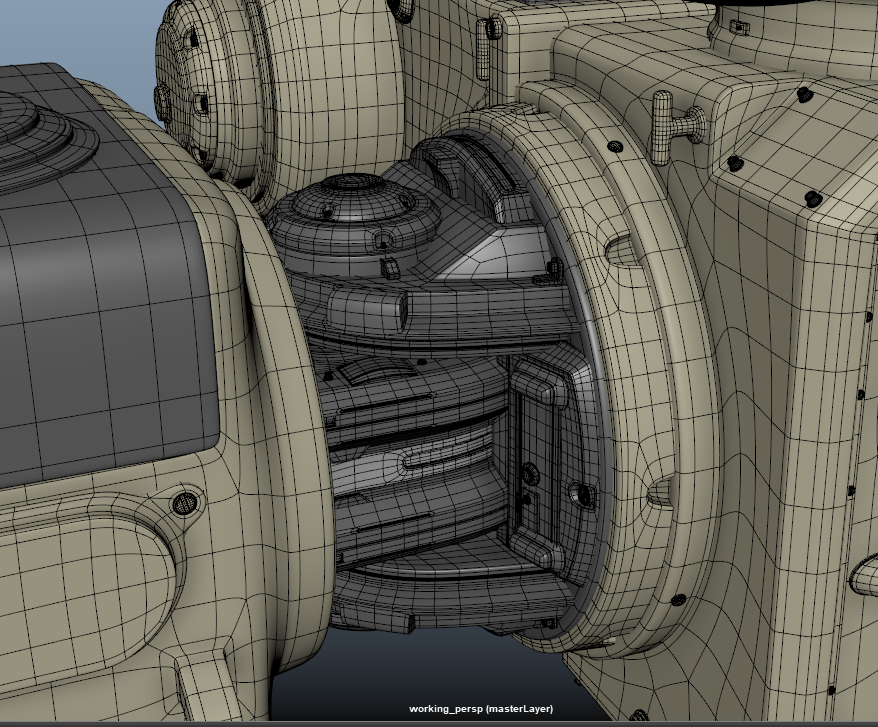
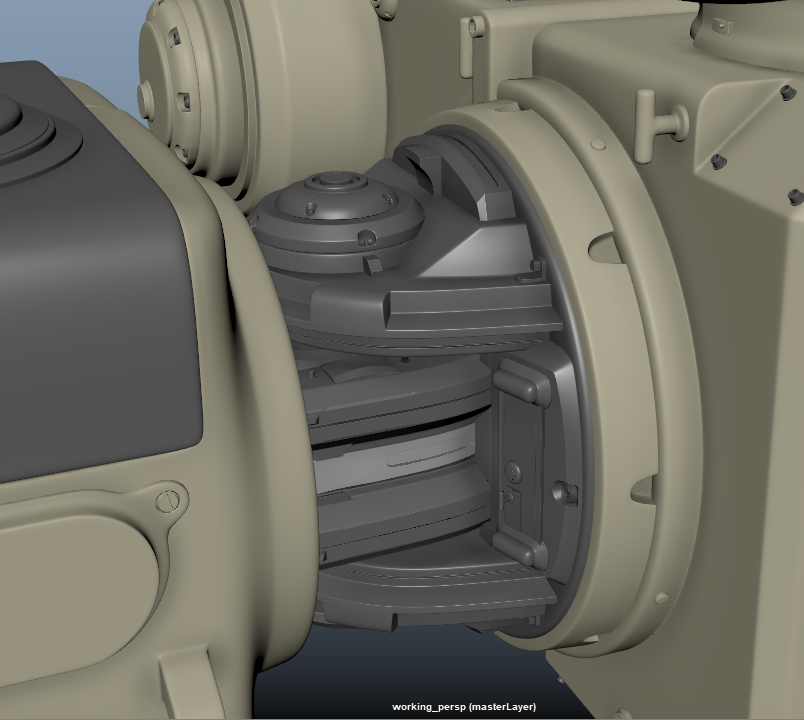
C’était de loin l’articulation la plus compliquée, tout du moins pour moi. J’ai passé du temps à essayer de comprendre comment cela pourrait marcher, et heureusement nous avons trouvé la solution avec Andrew, et c’est tout de suite plus simple à construire, une fois qu’on a compris.
La jambe a deux rotations, une sur l’axe Y, une autre sur l’axe X. Alors l’articulation est faite de deux éléments rotatifs, un pour chaque axe.
Le côté pratique, c’était que j’avais déjà fait l’articulation du genoux, de la jambe, et du pied, alors maintenant j’avais plein d’éléments circulaires et rotatifs dans ma bibliothèque de kitbash. J’ai construit avec cette base.
Je vais d’abord vous montrer comment ça marche, ensuite à quoi cela ressemble.
Conclusion
La modélisation dans Maya est maintenant finie (Mars 2025). Maintenant nous nous dirigeons vers Zbursh et les displacement map, ainsi que les UVs, qui sont pour la plupart déjà unwrapped, mais il me reste encore tout le layout de ces UVs à faire.
N’oublions pas le texturing, que je ferais en dehors de ce mentoring, de moi-même.
Ne commençons pas à dire les remerciements maintenant, comme le projet n’est pas encore fini. J’ai appris énormément, ce n’est pas juste à propos de modélisation, ce mentoring a aussi été un moyen de comprendre comment travailler dans la pipeline de l’industrie actuelle. Notamment savoir comment les différents département s’articulent ensemble, comment se simplifier la vie en tant que modeler, et travailler plus intelligemment.
J’ai aussi appris à faire de véritables articulations, ce qui est vraiment bien. Sur mes projets précédents, je le faisait toujours un peu à l’oeil. Maintenant ces articulations sont logiques, cohérentes, et fonctionnent dans un contexte réaliste.

